Roger C. WIENSa, Sylvestre MAURICEb, and the ChemCam team
a Los Alamos National Laboratory, Los Alamos, NM 87545, USA
b Institute de Recherche en Astrophysique et Planetologie, Toulouse, France
When the Mars Science Laboratory (MSL) rover Curiosity lands on a phyllosilicate-rich Martian terrain in 2012, it will carry a number of new technologies for investigating the surface properties and environments. Almost every type of experiment is new to space flight, or at least new to Mars, except the imagers and the reliable Alpha Particle X-ray Spectrometer (APXS). New types of instruments include the first x-ray diffraction instrument, CheMin, and many aspects of the Sample Analysis on Mars (SAM) suite with its combined chemical processing capabilities, its multi column gas chromatograph mass spectrometer, and tunable laser spectrometer (TLS). Both SAM and CheMin have both been described in previous Geochemistry Newsletter articles (Mahaffy, 2009; Blake, 2010). Here we describe an equally novel instrument-ChemCam-intended for remote sensing in the vicinity of the rover.
Field rovers are generally equipped with instruments that can make measurements on a variety of timescales. Rapid measurements are needed to determine which samples are of greatest interest for those techniques that require longer time and more resources to analyze. The timescale for analysis must also take into account the spatial proximity. Instruments on the Mars Exploration Rovers (MER) and MSL fall into three categories: remote, contact, and in-situ. Remote analyses are typically rapid measurements of the surroundings that do not require time-intensive driving or positioning. Contact measurements require relatively little sample preparation, while in-situ instruments generally require the most time for not only positioning the rover to grab the sample, but also for grinding, sieving, and ingesting, taking several days in total for each analysis from decision-point to completion. One can consider sample selection as a funnel, with remote sensing carrying out the broadest sampling, contact instruments being selected for a narrower subset of samples, and the in-situ analyses being reserved for the samples of greatest interest. For the Pathfinder rover Sojourner, the only remote sensing tool was an imager. Ideally, however, remote sensing instrumentation can identify chemical and/or mineral compositions and preferably also identify critical parameters essential to understanding habitability and the biological potential for Mars, key goals for the MSL mission (Grotzinger, 2009).
The ChemCam instrument suite will fulfill MSL's need for rapid remote sensing by providing critical information as mentioned above and, at the same time, addressing additional issues raised by the MER investigations. Specifically, within the first year of MER operation two surface-related analytical issues emerged. One was the presence of weathering coatings on rocks on Mars (e.g., McSween et al. 2004; Haskin et al., 2005). How are these weathering layers produced? What could we learn if we had an instrument sensitive enough to carefully probe the weathering layers? Also, how did the weathering layers affect our interpretation of Martian rock compositions based on surface-level analytical techniques? A second issue was the ubiquitous presence of dust on rocks which interfered with traditional remote sensing techniques. If the rover had to drive up and brush off a sample in order to use its remote sensing technique, it should no longer be considered remote sensing.
It was into this context that we proposed laser-induced breakdown spectroscopy (LIBS) along with a context remote micro-imager (RMI) to provide compositional remote sensing for the MSL rover. In the LIBS technique a pulsed laser beam is focused to a small spot on a target, providing at least 10 MW/mm2, sufficient energy density to ablate atoms and ions in electronically excited states, creating a localized, brief plasma. The plasma emits light for up to several microseconds as the species decay back to ground state. The light is collected and spectrally dispersed to observe the characteristic emission lines of the elements present in the sample. By calibrating the spectra against those of standards, elemental abundances are determined. LIBS has been under development for several decades (e.g., Cremers and Radziemski, 1987) as an outgrowth of spark spectroscopy, providing a chemical analysis tool for inhospitable environments. It is also related to inductively coupled plasma mass spectrometry (ICPMS). LIBS was initially used in-situ; however, the real advantage comes at close- and medium-range stand-off distances on natural targets (e.g., Wiens et al., 2002), in which case no sample preparation or handling is needed. As an active technique the laser pulses rapidly remove dust coatings and profile into solid surfaces, for example to study and to remove weathering layers, exposing the pristine rock. No other remote technique possesses these advantages.
Table 1. ChemCam investigation goals directly address MSL mission goals.
| MLS Goals | ChemCam Investigation |
|---|---|
|
Characterize geology of landing site Investigate planetary processes of relevance to past habitability, including the role of water |
Rapid remote rock identification; quantitative elemental compositions |
| Soil and pebble surveys, average soil composition, maturity, and exotic materials | |
| Detection and study of hydrated minerals | |
| Rapid remote identification of surface ices | |
| Analysis for weathering coatings on rocks | |
| Study rock morphologies (RMI imaging) | |
| Analysis of samples that are inaccessible to the rover arm | |
| Assist arm and drill sampling | |
| Assess biological potential of target environments | Remote identification of organic material |
| Investigate the presence of toxic materials | Check for abundances of Be, Pb, Cd and As well above hazardous levels for humans |
The goals of the ChemCam investigation are listed in Table 1. These combine typical objectives of a remote sensing instrument, as discussed above, with specific capabilities of the LIBS investigation, especially where they align with major goals of the MSL mission. For example, unlike x-ray techniques, LIBS is sensitive to the light elements: H, Li, Be, B, C, N, and O. Importantly for Mars, it can identify H- or C-bearing materials and with proper calibration it can quantify the abundances of these elements. The complete ChemCam spectrum consists of 6144 channels covering three nearly overlapping spectral ranges from 240 to 850 nm. The spectrum is rich in emission lines, with many elements providing multiple emission lines. Overall, LIBS is sensitive to nearly all elements, but it is most sensitive to the alkali and alkali earth elements, with particularly low detection limits (e.g., < 100 ppm) for Li, Sr, and Ba. On the other hand, LIBS is relatively insensitive to elements on the other side of the periodic table, including S, Cl, and F. However, ChemCam can still detect sulfur at the several percent level, as expected for many materials on Mars.
It is thus fortuitous that Curiosity is equipped with both ChemCam and APXS, which is improved from the APXS units on the MER rovers. While ChemCam provides a large number of remote analyses, APXS, mounted on the rover arm, will provide a relatively smaller number of more accurate analyses. LIBS additionally provides very high spatial resolution (0.2-0.5 mm analysis spots) compared to APXS (~17 mm on MSL). ChemCam removes dust and weathering layers with multiple laser pulses, while APXS on MSL will use a brush to remove dust. And finally, while ChemCam is sensitive to light elements and is highly sensitive to alkalis, APXS will have significantly better sensitivity for sulfur and halogens. As can be easily seen, these capabilities are highly complementary.
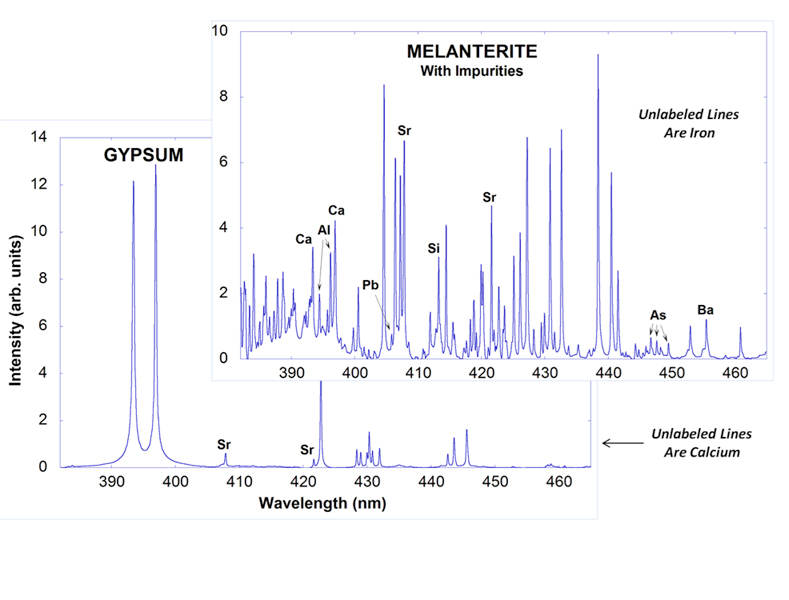
Figure 1 shows two contrasting LIBS spectra of rock powder standards recorded at 3 m distance with one of ChemCam's three spectrometers, using about two thirds of the full laser energy (10 vs. 15 mJ). In the spectrum of the relatively pure Gypsum sample (CaSO4·2(H2O); [SiO2] = 0.45% in this sample) all of the visible emission lines in this range are due to Ca except the two labeled Sr lines (930 ppm). The emission lines of H, O, and S are visible in other spectral ranges covered by ChemCam. By contrast, the spectrum of a quite impure melanterite (FeSO4·7(H2O) in pure form; the low magnitude of the 656 nm H peak suggests it converted to szmolnokite, the monohydrate form, in the Mars chamber) shows a plethora of emission lines, most of which are due to iron (all unlabeled peaks in the figure). However, the emission lines from a number of impurities can be seen, including Si ([SiO2] = 68%), Ca ([CaO] = 0.1%), Al ([Al2O3] = 0.9%), Sr (1930 ppm), As (960 ppm), Ba (450 ppm), and Pb (300 ppm; listed abundances are based on literature values). In general, transition elements such as Fe, Mn, Cr, V, and Ti display large numbers of LIBS emission lines, as seen in the case of Fe in the melanterite spectrum, while a smooth baseline, such as seen in the gypsum spectrum in Fig. 1, is only found in samples lacking transition elements.
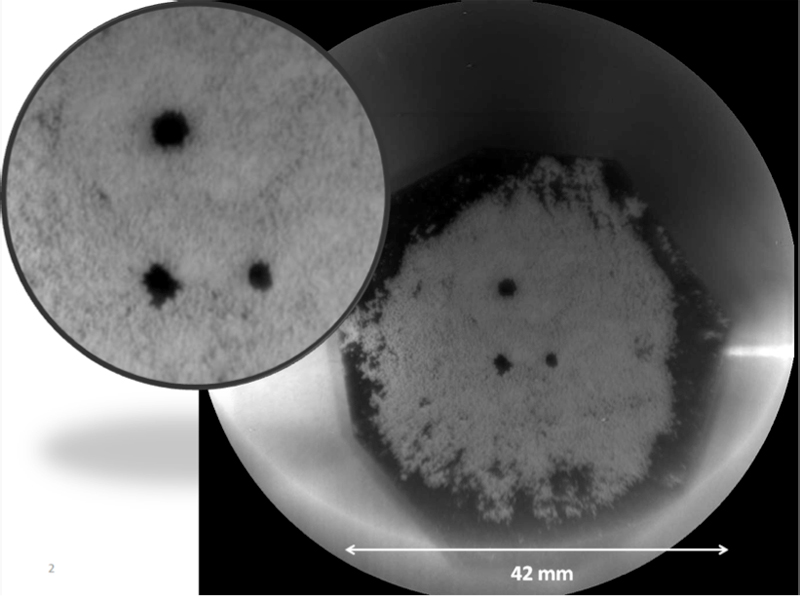
The ability to remotely remove dust using the laser is shown in an image taken by ChemCam's RMI imager in Fig. 2. The white dolomite powder (> 70% of the material has grain size < 20 µm) shown in this figure was screened off at a uniform height of 25 microns above the surface of a smooth slab of basalt. The three LIBS analysis spots were produced at 2.9 m distance with lower laser energies (7.5 mJ, right, and 10 mJ for the two on the left) than the 14 mJ to be used on Mars. Ten laser shots were used for the right and lower left spots, while 50 shots were used for the spot in the upper left. An enlarged view in the inset shows that the dust, which tended to clump together, was cleared from areas 1.5 to 2.4 mm in diameter. The actual analysis spots are smaller and are not seen without stretching the image contrast. Investigation of the individual spectra shows that in the case of the lowest energy laser analysis the composition effect of the dust was no longer seen in the spectrum by the fourth shot. A similar test was carried out with an inclined sample and a much thicker (>1 mm) dust layer. The signature of the underlying rock appeared within the first ten laser shots. During the next several shots some of the dust fell back into the hole. By the time twenty-five pulses were fired the spectra were dust-free and remained that way as additional shots were sent. Depth profiles have been carried out in several homogeneous solid samples of carbonate and basalt. For analyses of up to 1000 pulses, depths in the range of 300-600 µm were achieved. More work is planned using layered rock targets with replica instrumentation understand how much contamination from the upper layer affects measurements of the lower layers (e.g., Cousin et al., 2011).
Table 2. Key ChemCam instrument parameters
| Laser type | Nd: KGW |
| Laser pulse duration | 5 ns |
| Laser wavelength | 1067 nm |
| Laser repetition rate | 1-10 Hz |
| Laser pulse energy | 14 mJ |
| Laser spot diameter on target | 200-500 μm |
| LIBS nominal distance range | 1.5-7 m |
| Telescope aperture | 110 mm |
| Spectral range | 240-850 nm |
| Spectrometer type (3 units) | Cross Czerny-Turner |
| Spectral channels | 6144 x 14 bit |
| Spectral resolution (FWHM) | 0.2 nm (0.65 nm (>500 nm) |
| Spectral exposure | 10 ms - 10 s |
| RMI imager CCD | 1000 x 1000 pixels |
| RMI typical exposure, Mars | 40 ms |
| RMI imager resolution | 0.10 mrad |
| RMI imager field of view | 20 mrad |
ChemCam's key parameters are given in Table 2. To facilitate rover accommodation, the instrument was built into two parts, as shown in Fig. 3. The laser, telescope, RMI, and associated electronics are located on the mast of the rover. The LIBS light collected by the telescope is transported to the spectrometers in the body of the rover via a 5.7 m long optical fiber. The physical division of the instrument facilitated construction by the two equal partners: The mast unit was constructed and tested under the leadership of the Institute de Recherche en Astrophysique et Planetologie (IRAP) at the Observatoire Midi-Pyrénées in collaboration with the Centre Nationale d'Etude Spatiale (CNES) in Toulouse, France. The body unit, including an optical demultiplexer, three spectrometers, electronics, data processing unit, and flight software, was constructed by Los Alamos National Laboratory (LANL). The instrument's software includes an autofocus routine and, for the RMI, an auto-exposure code. Jet Propulsion Laboratory characterized the CCDs, provided a thermo-electric cooler for the detectors, and developed the mast-to-body optical fiber in collaboration with Goddard Space Flight Center.
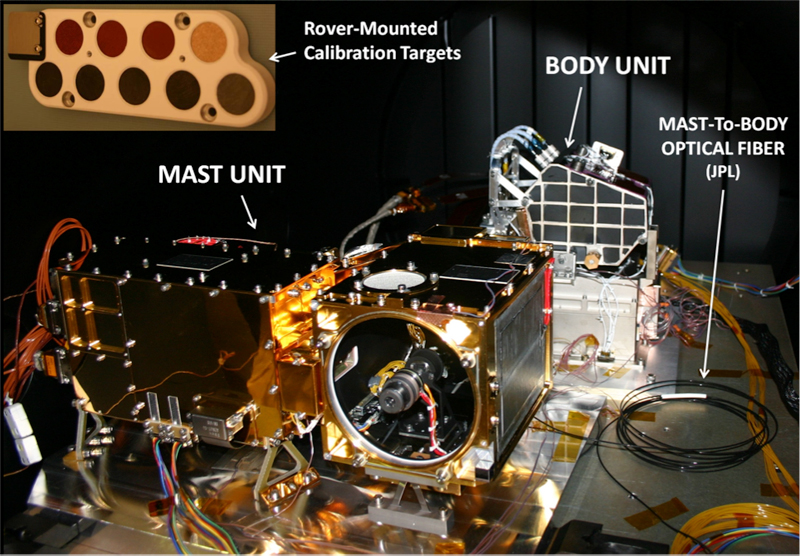
An on-board calibration target (Fig. 3) is installed on the rover at a distance of 1.54 m from the ChemCam telescope. The target consists of four igneous glasses, three of which were synthesized to replicate shergottite, picrite, and norite compositions, and one target is a natural macusanite glass (Fabre et al., 2011). The target also includes four ceramics fabricated from varying mixtures of Totavi basalt, gypsum, and either nontronite standard NAu-2 or kaolinite standard KGa-2 (Vaniman et al., 2009). Two additional materials in the target assembly are graphite to facilitate carbon quantification (Ollila et al., 2011) and titanium for wavelength calibrations and standardization.
ChemCam is designed and planned to be used daily on Mars. Operations planning divides the rover activities into reconnaissance sols (sol = Mars day), drive sols, approach sols, contact sols during which arm-mounted instruments APXS and MAHLI (hand lens imager) are used, and in-situ analysis sols during which CheMin and SAM analyses are carried out. ChemCam can be used to perform reconnaissance on both of the first two types of sols. During approach sols ChemCam data will help select the precise sample for in-situ analysis, and during contact and in-situ analysis sols ChemCam can perform additional surveys of surrounding materials. A typical analysis will consist of a number of laser pulses sufficient to remove surface dust, followed by a number of laser pulses (e.g., 30) that will be averaged together for better statistics. At times depth profiles will be performed to understand the compositions of dust and weathering layers as well as the rock composition. Because the LIBS analysis spot size is by necessity ≤ 0.5 mm in diameter in order to achieve the energy density required to produce a plasma, determining a whole-rock composition requires multiple analysis spots for medium- and coarse-grained lithologies (Thompson et al., 2006; Anderson et al., 2011).
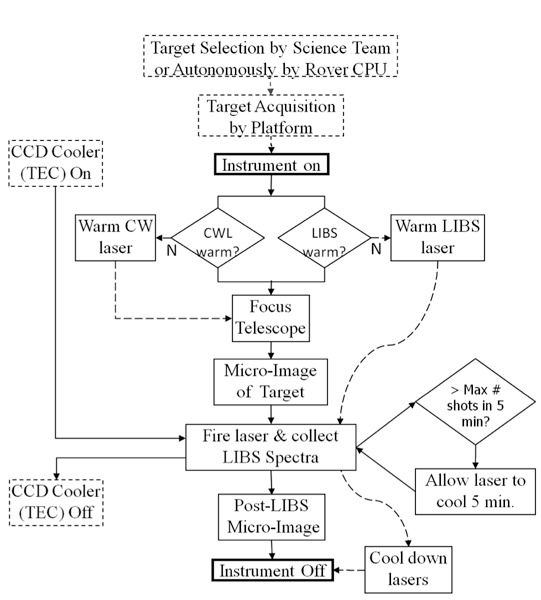
The instrument operation flow is shown in Fig. 4. Each analysis spot is expected to take about six minutes and two Watt-hrs, but in most cases it will be necessary to warm the laser from the -40°C survival temperature of the mast to its operation temperature of -10°C, taking about 20 minutes before the first analysis of the day. There is also some time required at the end of analyses to slowly cool the unit and to defocus to a sun-safe configuration and stow the mast. Of the actual analysis, the laser shots will normally operate at 3 Hz, taking only ~20 s, while up to 3 minutes is required for focusing and some tens of seconds are required for transferring the data. RMI context images will be taken before and after each LIBS analysis, transmitting only the pixels corresponding to the LIBS spot on the second image.
Consistent with the instrument itself, ChemCam's science team consists of French and US members in nearly equal representation. Operation of the instrument will also be shared. The length of Martian days being 39.6 minutes longer than Earth's, rover operations will precess relative to the terrestrial clock on a 36.4 day cycle. ChemCam operations will divide this into 18 days for French operation during the time in which the data come to Earth at an earlier time of day, and 18 days for US operations. Scientists from both countries will continually staff working groups tasked with rover planning, with the result that decision-making for ChemCam will not be completely run by one country at any time.
The LIBS data are rich in emission lines (Fig. 1), allowing the development of training sets of spectra of standards of known compositions, which are used with multivariate analysis techniques to perform: 1) rapid multivariate spectral classification to categorize samples by rock type, 2) multivariate analytical processing against a database of standards for quantitative elemental abundances, and 3) univariate analyses of individual emission lines in some cases. Data pre-processing begins with subtracting the non-laser-induced background from the active spectra, correcting for the instrument response and for wavelength drift, and identifying emission lines. For sample classification the team utilizes the linear projection algorithms of principal component analysis (PCA) and independent component analysis (ICA) (e.g., Comon, 1992; Sirven et al., 2007), complemented by the non-linear stretching technique of Sammon's map (Lasue et al., 2011). Given the rapid daily turn-around needed for tactical data, these techniques will quickly inform the MSL team whether rocks or soil samples analyzed the previous sol are similar to or different from samples encountered previously on Mars.
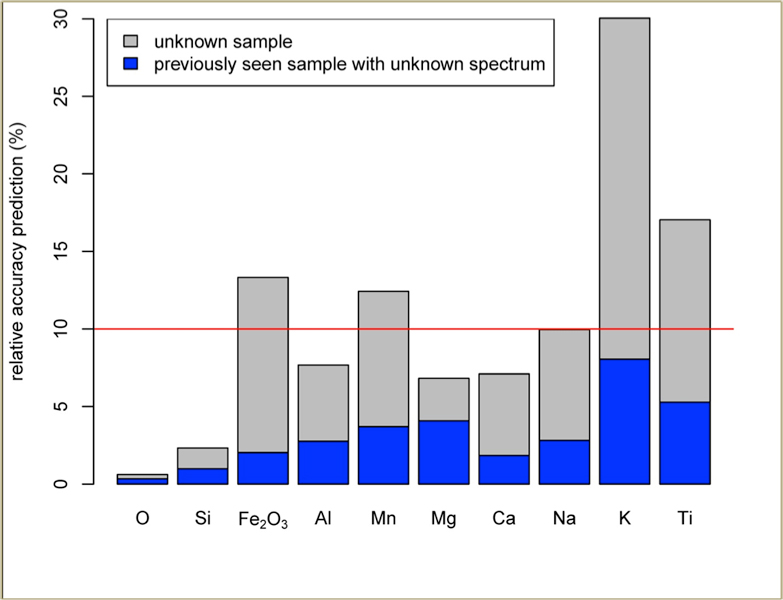
For quantitative analysis the team uses partial least squares (PLS) regression against agreed-upon sets of standards, the spectra of which are taken in terrestrial laboratories with replica instrumentation. Tests with data taken prior to instrument delivery show that analytical precisions and accuracies of the major elements generally meet the goal of ≤10% relative error. Median accuracies from two different PLS analyses of data taken at 5 m distance on ten basalt and andesite rock powder standards are shown in Fig. 5. Each analysis used fifty laser pulses and the spectra of all but the first five pulses were averaged together. Four spots were analyzed per sample. The figure shows that prediction accuracies are quite highly dependent on the quality of the match of standards to the unknown. The data shown in gray leave out all analyses of the unknown from the training set. By contrast, the blue bars show median errors obtained when three analysis spots of the same standard are included in the training set used to predict the fourth spot on a given sample. Although the composition of these three spots is identical to the unknown, this detail is not known by the algorithm. Even so, the accuracy is significantly improved, showing that matching the unknown closely with training set standards is important. As a result, in actual analyses an iterative approach must be taken in which a completely unknown sample is first estimated using standards covering a broad array of composition space to provide an approximate composition. The composition is further refined using a training set of standards focused to match the initially predicted composition. The ChemCam team plans to compare its Mars analyses against terrestrial standards analyzed in similar laboratory-based instruments to provide the needed training set for calibration.
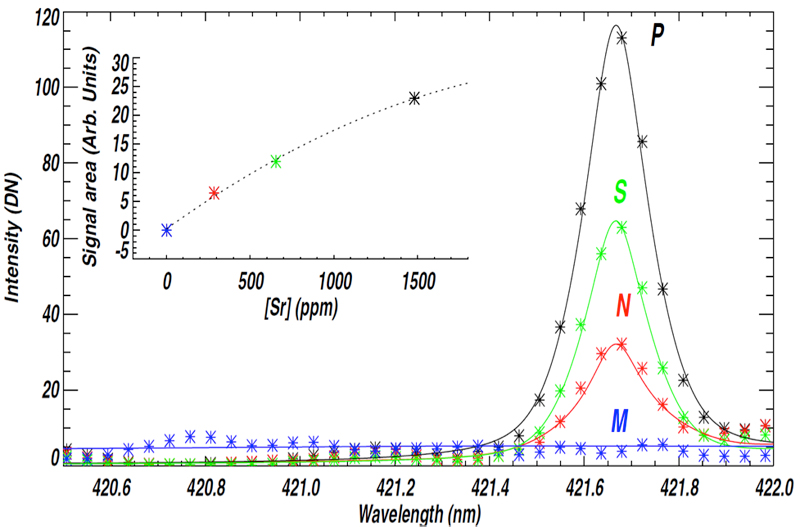
Finally, in some cases univariate analyses of selected emission lines will be undertaken for specific studies. As an example, strontium displays only two relatively strong emission lines at 407.89 and 421.67 nm (cf. Fig. 2). For the on-board igneous calibration targets the latter Sr emission line produced an excellent calibration curve, as shown in Fig. 6.
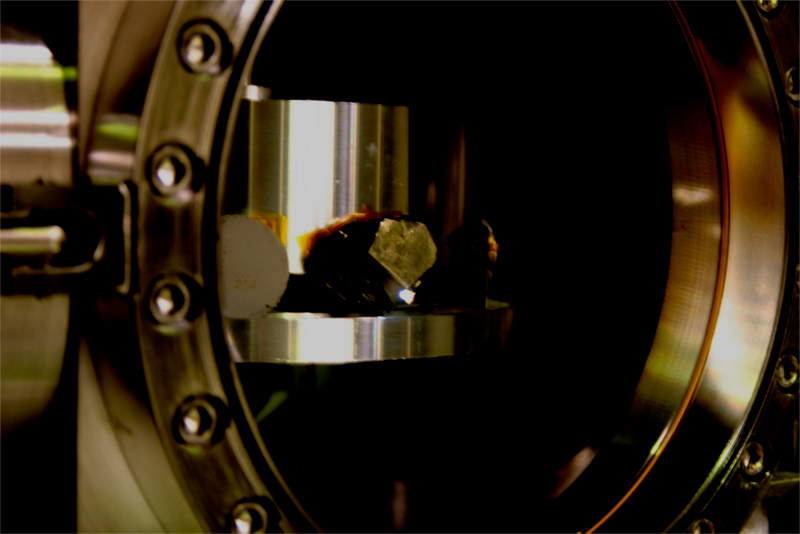
ChemCam will capture the public imagination as the first laser gun in space. Fig. 7 shows a ChemCam spark erupting from a pyrite crystal in air at 8.7 m distance. Iron- and sulfur-rich samples tend to couple to the 1067 nm laser beam better than ordinary rocks, so we were able to shoot this sample at a significantly longer distance than ChemCam's nominal limit of 7 m.
In summary, the ChemCam instrument suite includes the first LIBS experiment designed for space exploration. Its tactical role is to provide the MSL team with information on rocks and soils surrounding the rover, enabling efficient operations planning. It is a radical departure from previous remote sensing and the small spot analysis will be extremely useful in scanning across stratigraphic layers encountered by MSL. ChemCam's ability to study compositional variations among soil and rock layers provide for the first time a means to systematically investigate rock weathering and soil stratification. The ability to study light-element abundances directly addresses MSL and Mars goals to follow the water and to investigate habitability. These remote analyses are enabled by the removal of obscuring dust using the initial laser shots for cleaning the surface. ChemCam also provides the highest resolution context imaging of the analysis spots, enabling much better interpretation of the analyses than otherwise. Overall, ChemCam is a novel way to interrogate samples, effectively brushing and 'ratting' (i.e., performing the same function as MER's rock grinder on) the analysis spot without needing the mechanical complexity of an arm touching the surface.
ACKNOWLEDGEMENTS
A great many people on the ChemCam team and elsewhere are thanked for their contributions to this work. In particular, J. Lasue contributed the PLS plot, C. Dufour and R. Perez processed the RMI image, C. Fabre contributed the plot showing the Sr emission line detail. B. Barraclough, S. Clegg, S. Humphries, A. Ollila, R. McInroy, A. Mezzacappa, L.-M. Nortier, D. Delapp all worked to produce the ChemCam data, just to name a few. This work was graciously supported by CNES in France and by NASA's Mars Program Office through MSL in the US. The manuscript benefitted from comments by J. Lasue, P. Mahaffy, and two anonymous reviewers, and editorial support by S. Komor was greatly appreciated.
REFERENCES
Anderson R.B., Morris R.V., Clegg S.M., Bell J.F.III, Wiens R.C., Humphries S.D., and Mertzman S.A. (2011) Remote quantitative chemical composition of rocks using laser induced breakdown spectroscopy with partial least squares and artificial neural network methods. Submitted to Icarus.
Blake D. (2010) A Historical Perspective of the Development of the CheMin Mineralogical Instrument for the Mars Science Laboratory (MSL '11) Mission. Geochemical News 144, September. http://www.geochemsoc.org/publications/geochemicalnews/gn144sep10/ahistoricalperspectiveofth.htm
Comon P. (1992),Independent component analysis, in: J.L. Lacoume, (Ed), Higher-Order Statistics, Elsevier, Amsterdam, 29-38.
Cousin A., Maurice S., Forni O., Wiens R., Berger G., and the ChemCam team (2011) Depth profiles studies using ChemCam. Lunar Planet. Sci. LXII. Abstract 1963. The Lunar and Planetary Institute, Houston, TX.
Cremers D.A. and Radziemski L.J. (1987) Laser plasmas for chemical analysis. Chapter 5 in Laser-Induced Plasmas and Applications (L.J. Radziemski, R.W. Solarz, and J.A. Paisner, eds.), Marcel Dekker, New York, pp. 351-415.
Fabre C., Maurice S., Cousin A., Wiens R.C., Forni O., Sautter V., and Guillaume D. (2011) Onboard calibration igneous targets for the Mars Science Laboratory Curiosity rover and the Chemistry Camera Laser Induced Breakdown Spectroscopy instrument. Spectrochim. Acta B, doi: 10.1016/j.sab.2011.03.012.
Grotzinger J. (2009) Beyond water on Mars. Nature Geoscience 2, 1-3.
Haskin L.A., and 29 co-authors (2005) Water alteration of rocks and soils on Mars at the Spirit rover site in Gusev crater. Nature 436, doi:10.1038/nature03640.
Lasue J., Wiens R.C., Forni O., Clegg S.M., Maurice S., Stepinski T., and the ChemCam team (2011) Non-linear mapping technique for data visualization and clustering assessment of LIBS data: Application to ChemCam data. J. Anal. Bioanal. Chem., DOI 10.1007/s00216-011-4747-3.
Mahaffy P. (2009) Sample Analysis at Mars: Developing analytical tools to search for a habitable environment on the red planet. Geochemical News 141, October. http://www.geochemsoc.org/publications/geochemicalnews/gn141oct09/sampleanalysisatmars.htm
McSween H.Y., and 34 co-authors (2004) Basaltic rocks analyzed by the Spirit rover in Gusev Crater. Science 305, 842.
Ollila A.M., Blank J.G., Wiens R.C., Lasue J., Newsom H.E., Clegg S.M., Cousin A., Maurice S. (2011) Preliminary results on the capabilities of the ChemCam laser-induced breakdown spectroscopy (LIBS) instrument to detect carbon on Mars. Lunar Planet. Sci. XLII. Abstract 2395. The Lunar and Planetary Institute, Houston, TX.
Sirven J.-B., Sallé B., Mauchien P., Lacour J.-L., Maurice S., and Manhes G. (2007) Feasibility study of rock identification at the surface of Mars by remote laser-induced breakdown spectroscopy and three chemometric methods. J. Anal. Atomic Spectrosc. 22, 1471-1480.
Thompson J., Wiens R.C., Clegg S., Barefield J., Vaniman D., and Newsom H. (2006) Remote LIBS Analyses of Zagami and DAG 476 Martian Meteorites. J. Geophys. Res., 111, E05006, doi:10.1029/2005JE002578.
Vaniman D.T., Clegg S., Lanza N., Newsom H., Wiens R.C., and the ChemCam team (2009) Fabrication of sulfate-bearing ceramic calibration targets for the ChemCam laser spectroscopy instrument, Mars Science Laboratory. Lunar Planet Sci. XL. Abstract 2296. The Lunar and Planetary Institute, Houston, TX.
Wiens R.C., Seelos F.P. IV, Ferris M.J., Arvidson R.E., Cremers D.A., Blacic J.D., and Deal K. (2002) Combined remote mineralogical and elemental identification from rovers: Field and laboratory tests using reflectance and laser-induced breakdown spectroscopy. J. Geophys. Res. Planets., 10.1029/2000JE001439, 30 August.
Wiens R.C., and 13 co-authors (2011) Calibration of the MSL / ChemCam / LIBS remote sensing composition instrument. Lunar Planet. Sci. XLII. Abstract 2370. The Lunar and Planetary Institute, Houston, TX.